| 以eVTOL为代表的低空飞行器是低空经济重要载体,新型飞行器场景快速拓展空间广阔,《绿色航空制造业发展纲要(2023-2035年)》中提出 2025 年实现电动垂直起降航空器试点运行,2035年实现以无人化、电动化、智能化为技术特征的新型通用航空装备商业化、规模化应用。飞行器制造处于低空经济的中游,现有构型数量繁多,存在适用性和取证难度的问题;结构上看,推进系统、结构和内饰、航电系统占主要成本,机体、动力和能源系统、航电系统是企业核心竞争力所在。适航认证是目前各企业想实现市场化的必经之路,目前全球仅亿航智能获得了全部三证。地区分布来看,广东、四川、北京、江苏是无人机与eVTOL企业数量排名前四的地区,当地均汇聚了传统航天资源或形成了明显的创新驱动。中国在辅件的研制上已经比较成熟,但在部分原材料还是进口为主;DEP(分布式电推进)为主要发展方向,目前仅卧龙电驱和极少数企业在该领域有布局;
具备先发优势的传统航空碳纤维复材厂商 国产替代企业:高性能复材、航电系统等 将DEP技术和永磁同步机应用在低空飞行器上的企业 具备高性能航空电池研发能力的企业 |
飞行器制造概览
随着城市空中交通(Urban Air Mobility,UAM)的兴起,引起了低空飞行器的研制热潮。eVTOL区别于常规飞机,可以实现垂直起降,更加低碳环保、噪声更低、自动化等级更高,因此在低空经济中,具备运行成本低、安全性和可靠性高的优势。近几年,全球eVTOL主机企业数量显著增长,目前呈现出中国企业数量多、欧美企业融资额度大的特点。
地区分布来看,广东、四川、北京、江苏是无人机与eVTOL企业数量排名前四的地区(数量超20家),上海、陕西、浙江等省市紧跟其后。除传统航空航天资源汇聚地北京与四川外,无人机与eVTOL产业在广东、上海等地已经形成了特色产业。行业创新驱动明显,这与美国加利福尼亚形成eVTOL制造商聚集逻辑上有共同之处。代表性的企业有广州亿航、上海峰飞等。
【1】eVTOL的多样化构型
在此前低空经济深度研究系列|低空经济概述一文中,我们知道目前eVTOL的造型多样,其中以降固定翼、矢量推力型、多旋翼型为主流。截至2024年5月,已有超过1000种相关的构型设计,形成当前多样化的设计情况主要有如下原因:(1)经济考虑:直接影响因素,构型涉及到购置成本、载重比设计、飞行速度以及占地面积等;间接影响因素,主要从适航取证的角度来考虑,比如构型设计不能太离谱,这涉及到取证周期,进而对经济性产生影响。
(2)任务需求:以城市和城际应用场景为例,由于市内“空中出租”对航程的需求较低,因此对于eVTOL的构型设计不必以满足长续航为主;反之,在城际飞行的时候,则需要考虑一定的航程需求,从而设计出对应的构型。

【2】成本结构
低空飞行器产业链较长,其中,位于中游的主机厂主要承担的是整机研发和集成的任务。按照曾经的独角兽企业德国Lilium所提供的数据,推进系统、结构和内饰、航电系统占主要成本。
目前低空飞行器多采用的是新型电动航空系统,结构成本较高,各主机厂必须努力将结构成本做优化,由此需要从结构成本中腾出更多资金,以留出空间给能源、推进和飞控系统。此外,主机厂生产不同机型的总成本区别较大,其中制造成本约占总成本的70%-75%,研发测试成本其次。下面分别展示了三类飞行器造型及对应的成本结构:
【3】国产化进展
(1)结构上,目前中国在开关、控制板、照明、限速器以及传感器等辅件的研制上已经比较成熟,但在部分原材料(如碳纤维板、胶水等)还是从日本进口,随着时间推移,国产供应链逐渐成熟,因此中国在结构领域实现完全国产化的可能性较大;(2)动力系统上,DEP(分布式电推进)为主要发展方向,目前仅卧龙电驱及极少少数企业在该领域有布局;(3)能源系统上,目前一般采用纯电动力系统,中国在锂电池领域处于世界领先地位,但由于BMS(电池管理系统)和电芯选择不足,导致行业内均缺乏航空领域可用的整包电池;(4)航电系统上,中国在飞控领域相对滞后,大多依赖进口解决方案。西安自动飞行研究所(618所)是主要供应商之一,但由于军事项目繁忙,其在民用领域的进展缓慢。
【4】产业链
无人机系统是复杂的系统工程,产业链较长。具体如下:
上游:无人机设计研发、关键原材料和关键电子零部件的生产环节,其中关键原材料有金属材料和非金属两大类,包括钛合金、铝合金、玻纤和碳纤维等材料,关键电子零部件包括芯片、板卡、电机、电池等。
中游:无人机系统集成制造环节,关键分系统包括飞行平台系统、地面系统和任务载荷系统三个方面,是无人机系统制造的核心部分。飞行平台系统包含动力系统、导航系统、飞控系统、通信系统和机体制造等环节,是无人机完成起飞、空中飞行、执行任务和返场回收等过程的核心系统。任务载荷系统包括摄像机、雷达、传感器等系统,是无人机功能实现的载体。地面系统包括遥测检测、地面监控、数据处理和起降等系统,是整个无人机系统的指挥中心。
下游无人机的应用场景,无人机可应用于军用侦察、军用攻击、航空拍摄、灯光表演、农林植保、灾难救援、物流运输、电力巡检、地理测绘等领域。
制造环节中,机体、动力和能源系统、航电系统是企业的核心竞争力所在。因此本文将依次展开详述。
机体制造
目前,低空飞行器主要采用碳纤维复材,低成本高效率的热塑性复材或为趋势。【1】 碳纤维复合材料
碳纤维复合材料在低空飞行器上广泛使用,材料上看,树脂基碳纤维复合材料占据市场近90%的份额。
根据现有资料,在几乎所有飞行汽车项目中,约75%-80%的复合材料用于结构部件和推进系统;其次是内部应用,包括横梁、座椅结构等,占12%-14%;电池系统、航空电子设备和其他小型应用占剩余的8-12%。其中,超过90%的复材为碳纤维复材,约10%的复材以保护膜的形式使用玻璃纤维增强。
在材料需求牵引下,低成本、高效率、规模化制造是碳纤维复合材料的重要趋势,因此热塑性碳纤维复合材料前景广阔。
【2】 “积木式”验证法
目前,航复材结构件验证采用“积木式”方法,将飞机研制过程中的试验验证环节根据试验件尺寸的大小划分成如下5个级别。积木法可以减小试验风险和降低成本,同时使得复合材料设计和适航审定规范化,是目前在复合材料飞机结构研制中普遍采用的验证方法。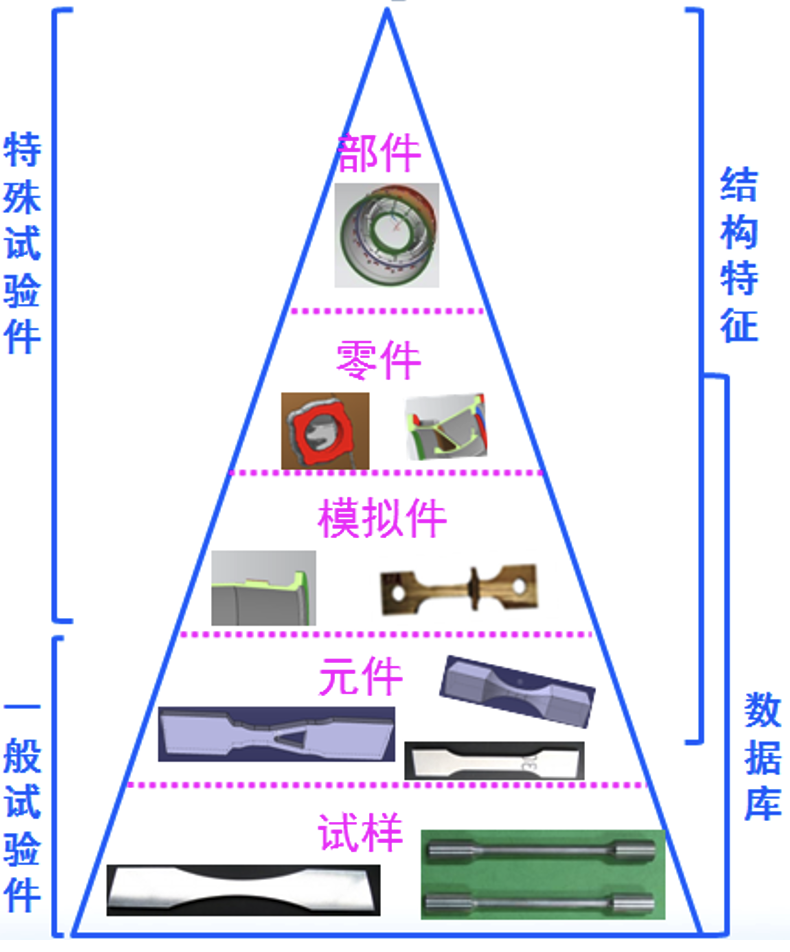
由于积木法需要大量底层材料性能和试样级试验,因此传统航空碳纤维复材厂商占据先发优势。国内代表性的上市公司在低空经济领域的布局情况如下:
此外,飞行器制造后还需检测。检测费用主要包括实验验证费用,涉及零部件系统、整机的台架验证、外部飞行验证和安全性验证。其中,风飞的检测费用可能在2000万以上。
动力和能源系统
目前,低空飞行器动力系统主要发展方向是分布式电力推进技术(DEP),能源系统主要采用纯电方案。【1】动力系统:朝DEP发展
实际上,eVTOL相较于传统飞行器最的最典型特征并不是是否用电,而是采用了分布式驱动系统(Distributed Propulsion,DP)。eVTOL在使用该技术时,采用的是DEP(Distributed Electric Propulsion),这种技术利用了电机的尺度独立性,即电机的功率密度和效率与其尺寸无关,因此可以在飞机的不同部位安装多个小型推进器,由电机驱动分布在机翼或者机身上的多个螺旋桨或风扇构成推进系统为飞机提供推力,以取代传统的大型发动机和复杂的机械传动系统。下面分别展示了倾转旋翼eVTOL(图左)和传统直升机旋翼(图右)的机构,可以直观地看出DEP的结构之简单。
DEP的主要优势如下:
(1)结构简单性与轻量化:通过在飞行器的不同部位安装多个小型推进器,取代了传统的大型发动机和复杂的机械传动系统,减轻了飞行器的重量,简化了结构,从而降低了制造成本和维护难度
(2)低噪音
(3)安全冗余:在分布式推进系统中,即使部分推进器发生故障,剩余的推进器仍然可以提供足够的推力来维持飞行,从而大大提高了飞行器的安全性
(4)垂直起降能力:相比于传统集中式推进,分布式推进方式可优化飞行空气流场,提高了系统安全性,也可以实现垂直起降等特殊功能,垂直起降功能对于需要在城市内操作的飞行器意义重大
(5)高能效:能量利用率可达90%-95%,传统内燃机在30%-40%
技术上看,据NASA,电机系统是整个分布式电推进系统的关键,1MW(兆瓦)电机技术和1MW功率变换器技术能够作为关键技术基础。目前中国在DEP领域处于空白阶段。国外在这一领域的研发较为成熟,如美国的Joby Aviation公司,其动力系统包括旋翼优化和噪声控制等方面都处于领先地位,主要采用的是分布式电力推进系统。国内卧龙电驱是第一个尝试切入该赛道的,此外还有,江苏迈吉易威、天津松正、深圳北极鸥等参与竞争。从目前情况来看,卧龙电驱依然面临着启动客户的挑战,且同类企业对该赛道的兴趣似乎不大。但是目前,实际运行的飞行器,尤其是中大型eVTOL中鲜有DEP的身影,究其原因有下两点:(1)技术难度大:在实现同样飞行功能的情况下,所生产的电动飞机质量过大,并且还需要额外的能量用来冷却工作部件,且电动机、转换器、断路器和冷却系统技术等方面还仍存在大量难题未得到解决,因此总效率非常低下;(2)电机、电池技术发展不足:若将DEP应用在大载重、长航程的飞行器上,目前电机、电池能量密度还达不到,因此目前仅能在短航程、小载重的eVTOL项目上使用此技术
【2】能源系统:纯电为主,混动在研
目前,低空飞行器的能源系统技术路线主要是纯电动和混合动力,纯电是目前主流的方案。但是纯电驱动能量密度低,在针对中长距离的低空出行时,纯电动目前还不具备可行性。内燃机的效率约为20%-36%,而电推进系统的效率可以达到75%-83%,是内燃机的3倍。但当前电池能量密度比内燃机的喷气燃料低约30倍,纯电动飞机要想达到传统飞机25-50%的航程,其电池能量密度需要超过1000Wh/kg,现有电池无法达到。而此时,混动eVTOL的最大起飞重量和电池重量降低、巡航高度更高、巡航距离更长、载荷能力更强,下图展示了本田混动eVTOL的续航及结构。
国内政策也在鼓励以混合动力研究方向。工信部《通用航空装备创新应用实施方案(2024-2030年)》中提到,以电动化为主攻方向,兼顾混合动力、氧动力、可持续燃料动力等技术路线,并开展400kW以下混合推进系统研制。但是,目前全球相关企业和机构在主要都推进纯电eVTOL,混合动力飞机或飞行器基本处于概念或早期研发阶段。究其原因可能有三:(1)技术挑战:混合动力系统的设计和集成相较纯电动系统更为复杂,需要同时管理传统燃油发动机和电动机,且飞行器和汽车不一样,无法做到动能回收。对初创eVTOL主机厂来说,这会导致更高的研发难度和更长的开发周期;(2)成本原因:混合动力系统的开发和制造成本较高,需要同时拥有出色的内燃机和电动机及联动系统技术。相较之下,纯电动系统的研发成本更低,且第三方供应商电池和电机技术更为先进,成本更低;(3)市场需求和监管因素:当前市场对零排放、低噪音的电动航空器有着强烈的需求。纯电动eVTOL能够提供更为环保和安静的解决方案,符合许多城市和政府的可持续发展目标
【3】未来发展趋势
(1)纯电为主,混动并存
目前,国内外的低空飞行器均以纯电动力为主。考虑到飞机续航能力需求,未来市场对混合动力系统也存在一定需求。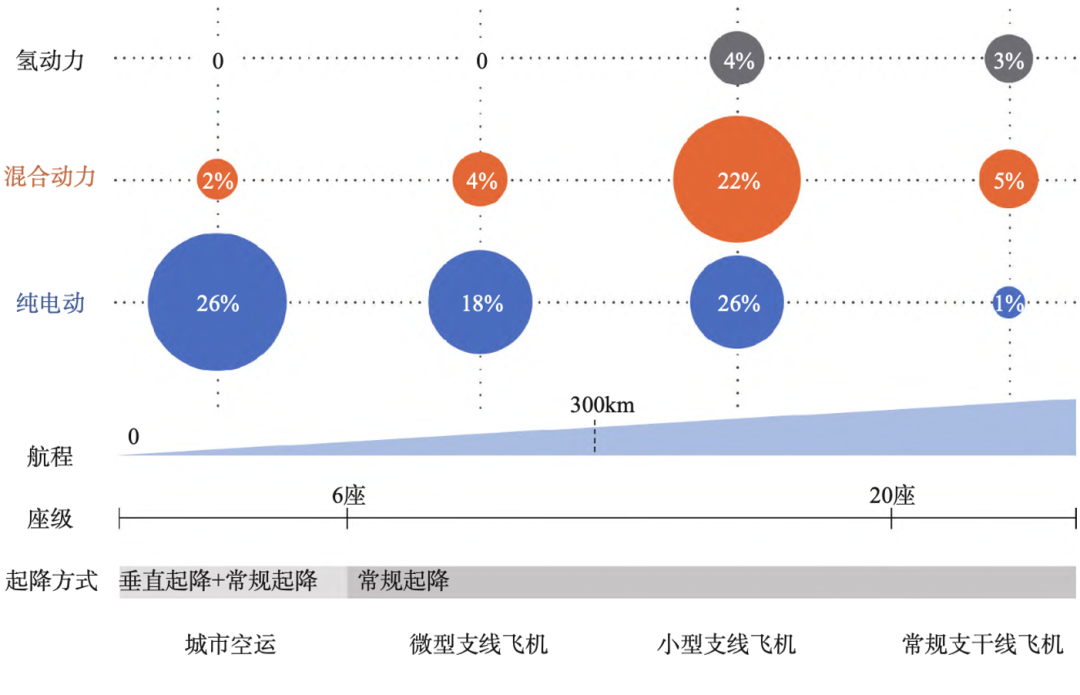
(2)高功率密度机电技术:永磁同步电机和超导电机
现代低空飞行器要求电机具有更高的功率密度,以在较小的尺寸和重量下提供足够的推力,并做备冗余设计,以保证在部分系统失效的情况下继续安全运行。与其他电机相比,高永磁同步电机(也叫无刷直流电机)是高功率电机,具有功重比较大、效率高和可靠性高的特点,因而高永磁同步电机成为eVTOL搭载的电机首选。下面展示了由NASA支持的高速外转子永磁电机基本结构,该永磁电机可在18000r/min转速下获得1MW输出功率,功率密度达到14kW/kg,效率超过97%
目前永磁电机的技术成熟度较高,功率等级和功率密度已经可以满足小型电推进系统的需要,目前研发方向是解决单台电动机的持续输出功率达到兆瓦级的问题,以及进一步提高电动机的效率并设计高效冷却方式。超导电机是采用超导体代替常规导电材料来实现电磁能与机械能之间能量转换的装置。可产生远高于普通电机的扭矩,在NASA试验中其功率密度高达25kW/kg,整个系统推进功率达到了35MW。超导电机在电动飞机的应用方面具有极高潜力,将会成为代替煤油喷气发动机的新型飞行动力装置的关键部件。但目前超导电机还处于实验室阶段,且绝大部分为半超导电机而非全超导电机,超导技术的发挥极度依赖冷却系统以维持超导状态。下图分别为半超导电机(图左)和全超导电机(图右)的结构:
(3)低空飞行器专用电池
相比新能车电池,eVTOL要求电池具有更高的能量密度。目前采用三元NMC锂电,未来可能采用固态、半固态、金属电池等。
目前,不少企业均已针对低空飞行器的电池做了专门的研究,代表性企业的业务进展如下:

航电系统
【1】航电系统的构成
航空电子系统是飞机上所有电子设备的总和,被形象地称之为飞机的中枢神经系统。其主要功能包括飞行控制、通信、导航、监视、显示等,具体如下:
下图为Garmin的G500航电系统及其架构,Garmin是通航系统主要供应商,该系统是面向轻型或者运动型通用飞机的航电系统产品,在轻型、运动型通用飞机航电系统架构上具有一定代表性。
【2】飞控系统
飞控系统是低空飞行器制造环节最核心的子系统之一,技术难度较大。飞控即飞行控制系统(Flight control system),最基本的功能就是在飞行过程中,分析各个传感器采集的数据,自动保持飞机的正常飞行姿态。多轴飞行器的飞行、悬停,姿态变化等都是由多种将飞行器本身的姿态数据传回飞控,再由飞控通过运算和判断下达指令,由执行机构完成动作和飞行姿态调整。其大致运作流程如下:
飞控系统可以分为姿态控制系统、导航定位系统、任务规划系统、飞行指令下发系统等,具体如下:目前的主流飞控系统主要采用电传操纵系统,主要应用于民航客机上,其控制机理如下:
低空飞行器要求在整机重量、体积小得多的情况下,还需加配飞控计算机和更多传感器,因此其飞控设计难度相比民航更大。
【3】导航系统
导航系统为飞行器提供姿态、方位、速度和位置的信息,同时提供飞行器的加速度和角速率,用于飞机的正确操纵和控制。最关键的指标是精度和可靠性,这两个指标的提升一般有2个途径:(1)采用更高级别的传感器,提升传感器的精度和可靠性;
(2)采用组合导航,组合多种不同工作原理的传感器,形成一套可靠性和精度都远高于单一传感器的组合导航系统。目前现代民航中最常用的是卫星导航和惯性导航(INS)组合。
低空飞行器对导航系统有低成本要求,这在低空飞行器体积、重量、功耗等限制下技术难度较高。传统航空产业的组合导航系统过于昂贵,动辄上百万的价格无法满足eVTOL成本结构的需求。因此,导航也对单机智能化提出了更高要求。
【4】其他
【5】航电系统发展趋势
在低空飞行器的使用场景下,航电系统产生了轻量化、智能化和低成本的需求,因此集成化是低空飞行器航电系统最主要发展方向。集成模块化架构(IMA)是现代航电系统的重要特征,其核心理念是硬件共享,即多个航空电子系统共用同一处理单元,从而降低成本,并优化重量、尺寸和能耗。现有的大型飞机主要面向长途航线的高效飞行,因此其航电系统更加关注可靠性、冗余性和与现有空中交通管理(ATM)系统的兼容性;而低空飞行器航电系统设计围绕城市低空飞行、短程运输和高频次起降需求,需特别注重自主飞行、避障和实时态势感知能力等,因此需将自动飞行、自动避障功能集成。由于低空飞行器的许多设计理念与汽车类似,可以借鉴汽车域控制器(DCU)的发展思路(详见行业研究|智能控制器与域控制器),尝试将汽车电子的成熟技术应用于低空飞行器并优化。不过从目前的实践来看,这种方式对处理器的算力和资源分配能力要求极高,且系统功能的耦合可能增加软硬件更改的复杂性,进而提高适航认证的成本。
适航认证
适航证是低空飞行器投入实际使用前所必须取得的证件,是企业商业化进程的最直观代表。我们常说的适航取证,实际上讲的是TC取证,主要为型号合格证。获得的难易程度上,TC>PC>AC
低空飞行器想要正式运行,至少需要三年的时间。截至2024年12月,我国有两款eVTOL获得相关证件,而海外暂无取证的企业:(1)亿航智能。2023年10月,亿航智能EH216-S型无人驾驶航空器系统获得TC,2024年4月获得PC,2024年7月,中国民航局正式受理了亿航智能的运营合格证(OC)的申请;
(2)峰飞航空。2024年3月,峰飞航空科技V2000CG无人驾驶航空器系统获得了TC。
亿航是全球第一个拿到载人eVTOL的生产许可证的企业,究其原因主要有三点:
(1)纯多旋翼的构型技术上相对简单,尽管某些技术不可简单化,但相较于复合翼和固定翼要简单得多;
(2)由于没有强制的过渡转换过程,风险大大降低。转换过程容易出现飞机失控等问题,而多旋翼没有这个问题,因此试验可以减少,取证速度更快;
(3)亿航采用了更加简化的操作系统,因此在审定过程中避开了一些复杂的要求
值得一提的是,其他主机无法直接复制亿航的路线,因为局方明确表示亿航获得TC是有特殊考量的。虽然亿航的构型简单且经过多年试飞积累了一定数据,但其全国产的产业链和供应链,以及适航科目,显示其审查力度不足;其零部件级的安全性水平达不到郊区点对点定点航线运营所需的水平。此外,取证不仅花费时间,还很“烧钱”。和汽车制造不一样的是,低空飞行器的研发必须从一开始就和产品定位深度匹配。低空飞行器在研发之初就必须考虑力矩平衡,在配重上做好规划,后续还需要在结构、飞控、气动设计等环节进行配套研发,如果任何一个环节出现不匹配的状况,再进行调整就会面临极高的成本。据深圳翱翔天际科技创始人,一款新的eVTOL机型在取得第一个证之前,需要经过样机生产、测试、调整等多个过程,起码要烧15个亿。
尾声
低空飞行器当前有一个全行业都仍未解决的问题,就是电池续航问题。且在成本构成中,电池占据了相当大的比例,因此在面临相关项目时,具体的收益和回本周期需要根据飞行器的使用频率和每次飞行产生的收益来计算。此外,实际上,低空飞行器的智能化和低成本在某种程度上存在着一定矛盾,但是为了实现产业规模化发展目标,低成本是回避不了的重要前提。因此,如何平衡智能化和低成本要求成为关键。如,可以通过引入AI技术,通过度学习算法,eVTOL可以开发出自适应飞行控制系统,实现自主导航、自主决策等功能。但是大模型的搭建和测试也需要大量时间和资金。因此,我们要认识到,任何一项技术都有着其适用范围,新旧技术的组合应用才能够取长补短;从成本角度看,新技术价值量更高、成本也高,必须与经济收益相匹配才能形成规模化应用的基础。